01 / Award-winning capstone
Exploiting Neural Network Approximations in Optimal Control
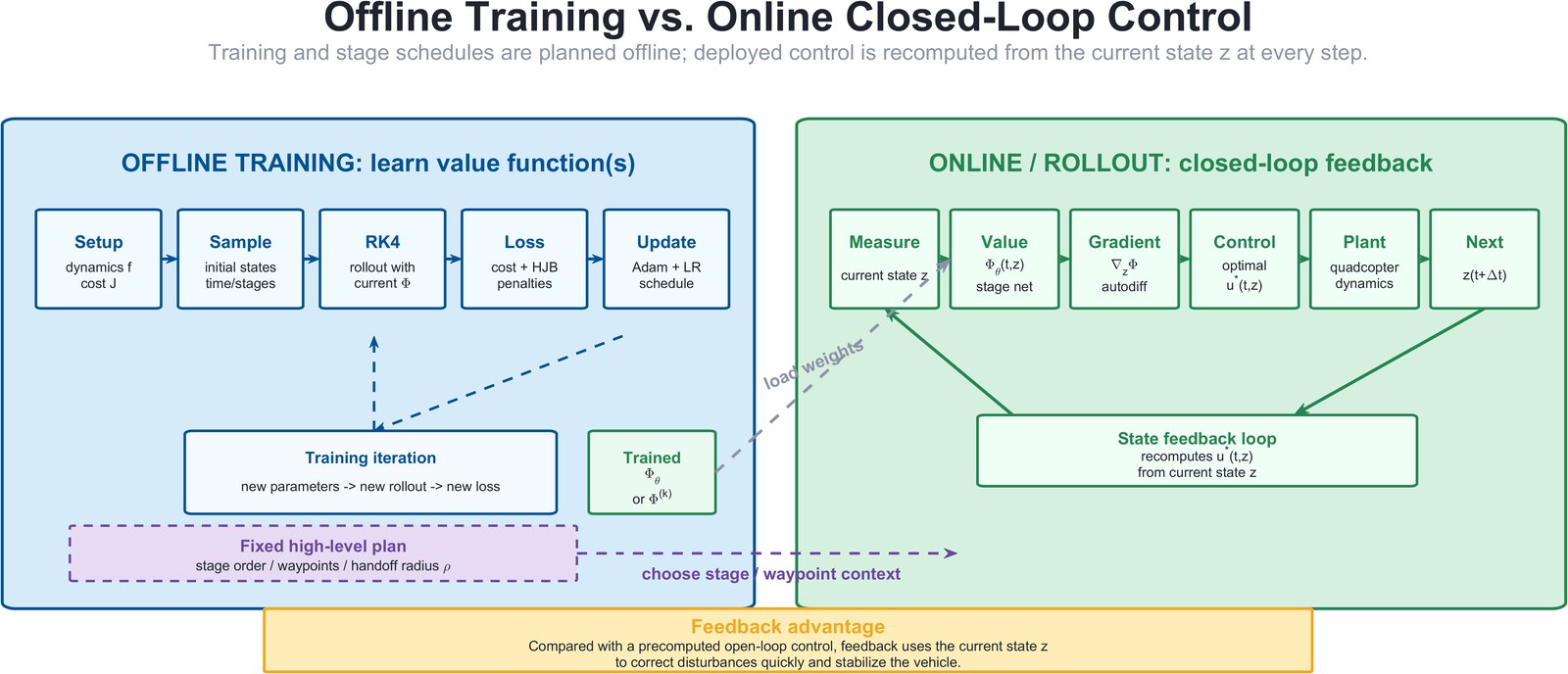
墨尔本大学 ENGR90038 硕士毕业设计,项目获得 Endeavour Awards Merit Award。我和队友围绕 12 维四旋翼轨迹规划复现并扩展 neural HJB / PMP 最优控制框架,用神经网络近似 value function,再通过 value gradient 恢复实时 closed-loop feedback control。
- 研究问题:传统 direct shooting / collocation 对单一初始状态可求高精度解,但状态扰动后需要重新优化;grid-based HJB 又会遇到维度灾难。
- 工程实现:搭建 Python 训练 pipeline,包含 12D quadcopter dynamics、RK4 rollout、HJB residual penalty、learning-rate schedule、采样分布诊断和自动化实验记录。
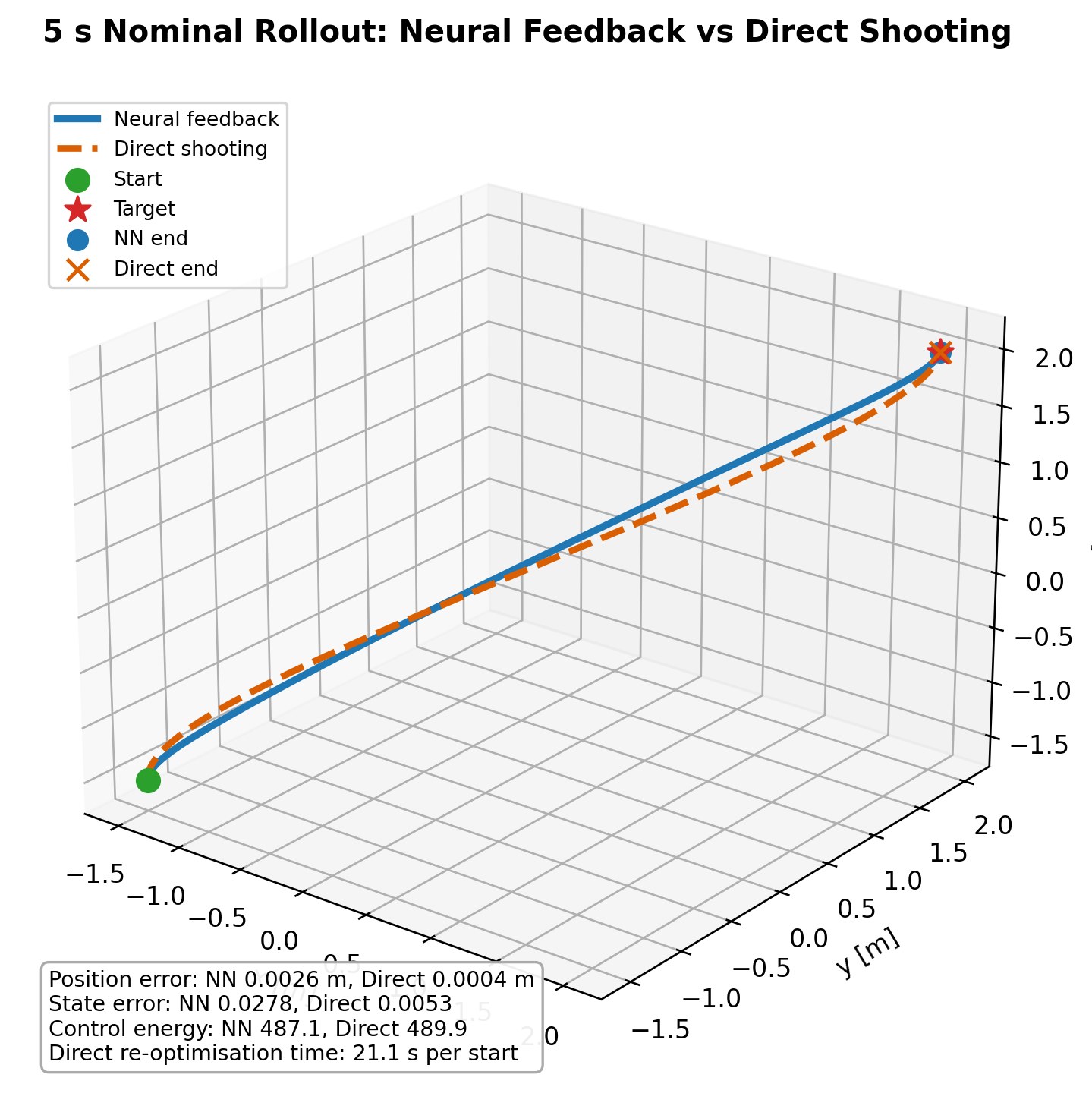
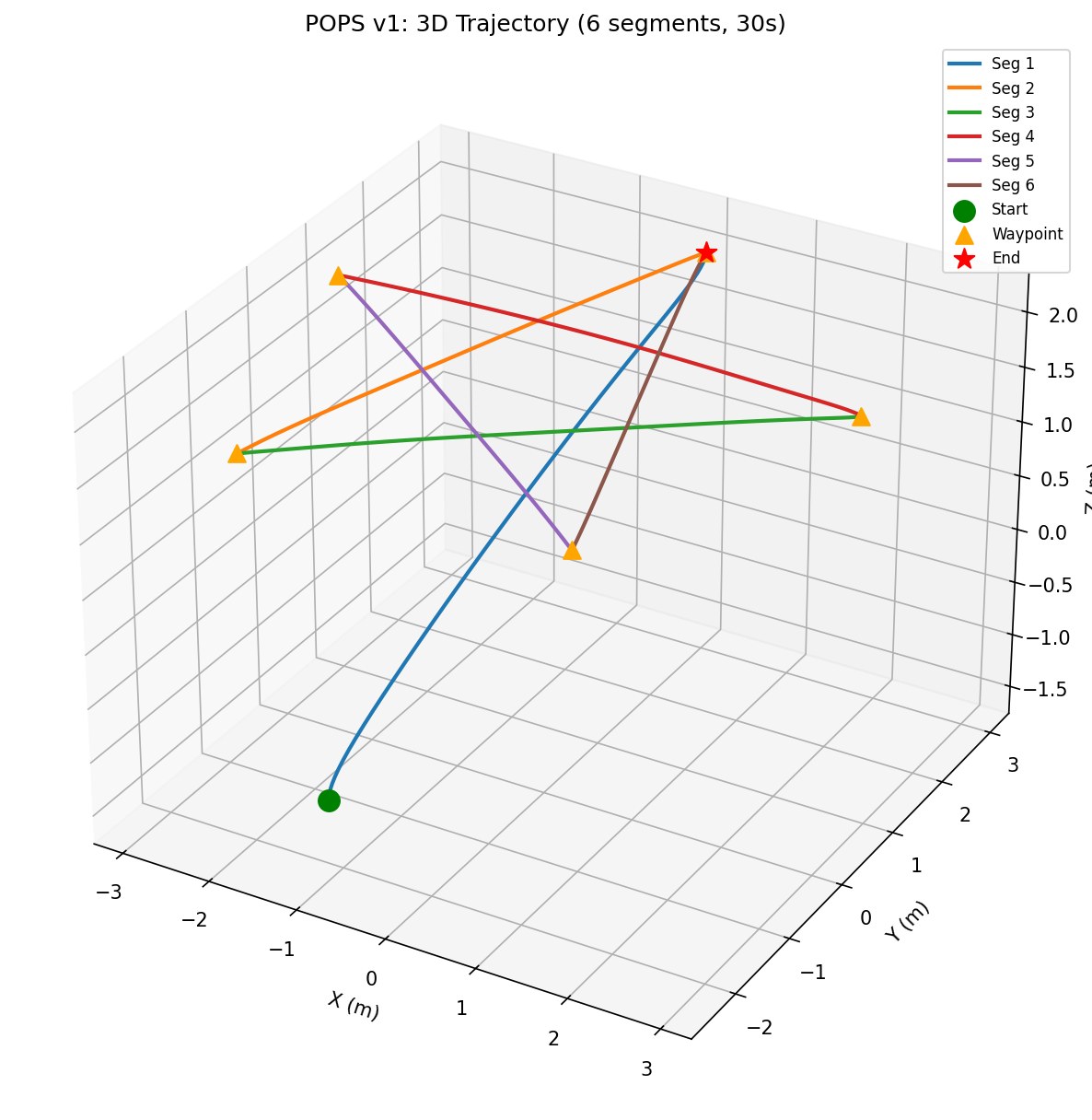
- 扩展结果:完成 1 秒复现、5 秒 neural feedback 与 direct shooting 对比、10 秒/30 秒 chained trajectory,并提出 state-ball DP handoff 来稳定长时域分解。
Endeavour Merit Award
12D nonlinear dynamics
0.0022 m terminal error